



APBI-CM-UC3M
DESIGN OF AN EFFICIENT PERCEPTION ALGORITHM FOR AUTONOMOUS DRIVING BASED ON UNCERTAINTY MANAGEMENT [APBI-CM-UC3M]
Autonomous driving represents a very challenging problem in terms of reliable obstacle detection and control of the actions performed by the vehicle. Today's vehicles may include different sets of sensors, including newer and more sophisticated ones, such as hyperspectral sensors, as well as radars, cameras and LiDARs. Each of these sensors provides specific information of the environment at different levels, with their respective associated uncertainty. These sensors constitute the perception systems, which can be implemented at two main levels: the vehicle and the infrastructures in interconnected systems, designed to increase driving safety in this novel means of transportation. The algorithms used to integrate this information will have to manage the propagation of quantified uncertainties and fuse the information efficiently. All this in order to reduce the uncertainty resulting from the scenario captured by the autonomous driving system, without affecting the safety of the vehicle and its environment.
Ensuring the safety of autonomous vehicles on the roads is the biggest challenge facing this emerging technology, due to the fact that they must coexist with conventional vehicles. The uncertainty in both perception and decision making of autonomous vehicles can be affected by the stochastic behavior of a conventional driver. The project proposed by the present research team will innovate perception systems by considering the two main problems in autonomous driving. First, it is intended to design or improve perception algorithms based on the most accurate and reliable detection methods known to date. These algorithms will be implemented both in the autonomous vehicle and in the infrastructure. Secondly, a probabilistic approach is going to be provided to calculate the safety margins, considering the uncertainty of the perception and interpretation of the environment of the proposed algorithms.
Main objective
The main objective of the present research project is the design of an efficient perception algorithm for autonomous driving based on uncertainty management.
Specific objectives
The specific objectives coming from the defined main objective are:
- Specific objective 1: To define the different agents that are sharing the environment with the autonomous vehicle (vehicles, pedestrians, etc.), as well as the characteristics that identify the infrastructure where the vehicle moves (lanes, guardrails, etc.) through the most innovative current techniques, which also allow predicting its behavior. This will include designing and implementing a reliable and cost-effective vehicle/infrastructure based perception solution using accurate deep learning methods that are capable of monitoring the evolution of vehicles and vulnerable road users (VRU).
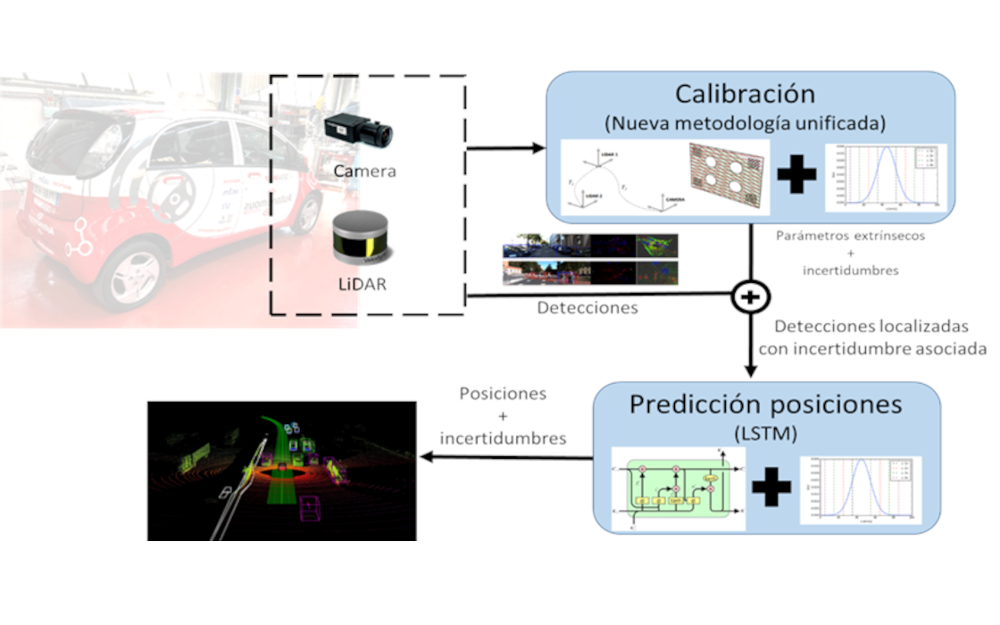
- Specific objective 2: To develop techniques for the fusion of the information obtained from the detected objects with the point cloud generated by LiDAR, in order to make inferences with datasets based on multimodal systems.
- Specific objective 3: To develop algorithms for the identification of detected objects, in order to have an advanced and efficient system for tracking objects on roads.
- Specific objective 4: To develop a general extrinsic calibration procedure, which allows knowing the probability distribution and the uncertainty of the calculated parameters, considering the contributions of the different variables and facilitates the inter-comparison of results.
- Specific objective 5: To implement innovative algorithms for uncertainty estimation, allowing to determine the degree of precision of perception and decision making of the systems involved.
- Specific objective 6: To conduct a real-world pilot where the operation of vehicles with different levels of automation can be tested.
Expected social and economical benefits
The project is a continuation of the research lines of the participating groups, which have more than twelve years of experience in the fields of AI, perception systems and uncertainty analysis, which will be applied to autonomous vehicles and intelligent systems. It is expected that in the short term the criteria of both groups will be unified in order to consolidate the bases on which the project will be developed.
The use of innovative methodologies for the calculation of uncertainty, such as those proposed in this project, have a potential impact on the reliability of perception systems. The precise quantification of the calibration parameters of these systems and the increase in the quality of the predictions made by them represent an advance in knowledge due to the incorporation of novel techniques for the quantification of uncertainties. The development of more efficient perception algorithms, based on the consideration of inaccuracies, can have a positive impact on society, since it can increase both the level of safety in driving and the confidence of users, which would facilitate the acceptance of these new technologies in daily driving.
The increase in road safety has an economical impact in the reduction of costs due to serious accidents, both for users and insurers. The development of perception algorithms based on uncertainty analysis will allow precise communication between different vehicles and infrastructure for the recognition of unforeseen situations, which could lead to a reduction in insurance premiums due to the increased reliability of the autonomous vehicle.
Publications
- Procedimiento para la caracterización probabilística de los parámetros intrínsecos de cámaras. Ramón Alberto Gutiérrez Moizant, María Jesús López Boada, María Ramírez Berasategui, Abdulla Al Kaff, Fernando García Fernández. XIV Congreso de Ingeniería Mecánica. Las Palmas de Gran Canaria ,octubre de 2023. This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M).
- Cuantificación de los efectos de las incertidumbres de un modelo de amortiguador magneto-reológico en un sistema de suspensión dinámica. Ramón Alberto Gutiérrez Moizant, María Jesús López Boada, Beatriz López Boada, María Ramírez Berasategui, Andrés Ricardo Valdez. XV Congreso de Ingeniería del Transporte CIT 2023. La Laguna, Tenerife, junio de 2023. This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M), and in the context of the VPRICIT (Research and Technological Innovation Regional Programme and by the FEDER/Ministry of Science and Innovation—Agencia Estatal de Investigacion (AEI) of the Government of Spain through the projects PID2022-136468OB-I00 and PID2022-142015OB-I00.
- Novel Bayesian Inference-Based Approach for the Uncertainty Characterization of Zhang’s Camera Calibration Method. R. Gutierrez-Moizant, M.J.L. Boada, M. Ramirez-Berasategui and A. Al-Kaff. Sensors. 23(18), 7903. 2023. doi: https://doi.org/10.3390/s23187903 . This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M), and in the context of the VPRICIT (Research and Technological Innovation Regional Programme and by the FEDER/Ministry of Science and Innovation—Agencia Estatal de Investigacion (AEI) of the Government of Spain through the projects PID2022-136468OB-I00 and PID2022-142015OB-I00.
- Detección de residuos urbanos mal ubicados mediante visión por ordenador e IA. Frutos, V., Pérez, B., Campos, S., Barrera, A., García, O., García, F., & Al-Kaff, A. In XLIV Jornadas de Automática. Universidade da Coruña. Servizo de Publicacións. (pp. 855-860), 2023. This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M).
- Navigating the Future: AI Innovations for Intelligent Mobility in Smart Cities Al-Kaff, A. (No. 2023-01-1901). SAE Technical Paper. 2023. This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M).
- Evaluating the Acceptance of Autonomous Vehicles in the Future. Carrasco, A. M., Gankhuyag, D., de Miguel Paraiso, M. A., Lorite, M. P., Olaverri-Monreal, C., & Al-Kaff, A. IEEE. (2023, June). This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M).
- Mono-DCNet: Monocular 3D Object Detection via Depth-based Centroid Refinement and Pose Estimation. Astudillo, A., Al-Kaff, A., & García, F. In 2022 IEEE Intelligent Vehicles Symposium (IV) (pp. 664-669). IEEE. (2022, June). doi: 10.1109/IV51971.2022.9827373. This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M).
- High-Accuracy Patternless Calibration of Multiple 3D LiDARs for Autonomous Vehicles. De Miguel, M. Á., Guindel, C., Al-Kaff, A., & García, F. IEEE Sensors Journal. 2023. doi: 10.1109/JSEN.2023.3268338. This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M).
- DAttNet: monocular depth estimation network based on attention mechanisms. Astudillo, A., Barrera, A., Guindel, C., Al-Kaff, A., & García, F. Neural Computing and Applications, 36(7), 3347-3356. 2023. https://doi.org/10.1007/s00521-023-09210-8. This work was supported by the Madrid Government (Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M).
News

Researchers from UC3M's Autonomous Mobility and Perception Lab (AMPL) attended the Madrid es Ciencia Fair, from 7 to 9 March, where they presented their ERIS test vehicle, which they are using to develop computer vision technologies applied to race environments and smart cities.
This work has been supported by the Madrid Government Comunidad de Madrid Spain) under the Multiannual Agreement with UC3M (“Fostering Young Doctors Research”, APBI-CM-UC3M), and in the context of the V PRICIT (Research and Technological Innovation Regional Programme).
